Description
Hi,
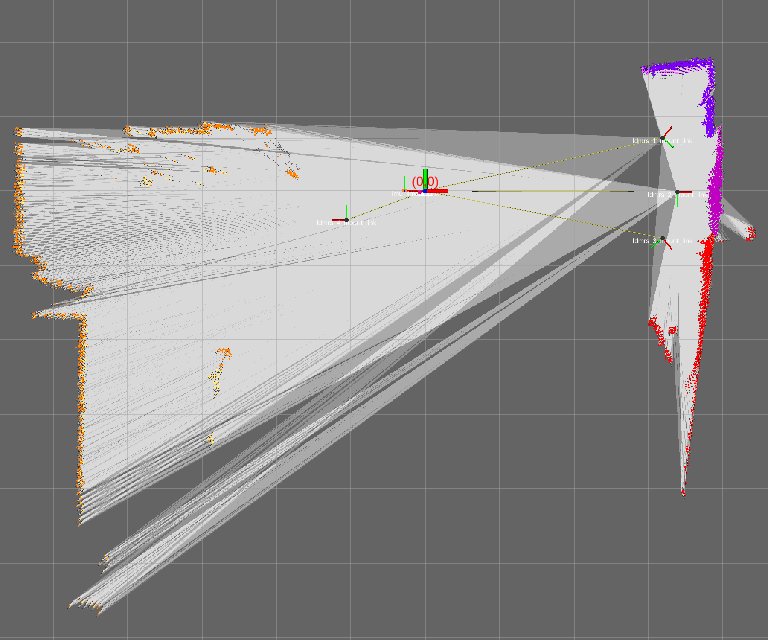
I'm going to map with four LIDARs which have some position separation. The occupancy grid (see screenshot) then gets some free-space lines drawn between e.g. sensor 1 (the upper right) and the orange data points measured by sensor 4 (the sensor most left). I think this shouldn't be the case, i.e. only free-space lines between each sensor and its own measured point cloud.
This is observed with setting TRAJECTORY_BUILDER_2D.num_accumulated_range_data >=1. With TRAJECTORY_BUILDER_2D.num_accumulated_range_data = 1, the behavior is correct, however scan matching quality is lowered then. I tested only the 2D version.